Virtual base class for classes that receive a value, maybe transform it and then do something with it. More...
#include <Setter.h>

Public Member Functions | |
| Setter () | |
| Constructor. More... | |
| Setter (Setter *target) | |
| Constructor with setting the target. | |
| virtual void | input (int value) |
| This is where incoming values are set. More... | |
| virtual void | setTarget (Setter *target) |
| virtual void | failsafe () |
| void | setFailsafeValue (int failsafeValue) |
| Sets the failsafeValue. | |
| int | failsafeValue () |
Protected Attributes | |
| Setter * | _target |
| This is the instance of Setter that will be given the transfotmed output value. | |
| int | _failsafeValue |
Detailed Description
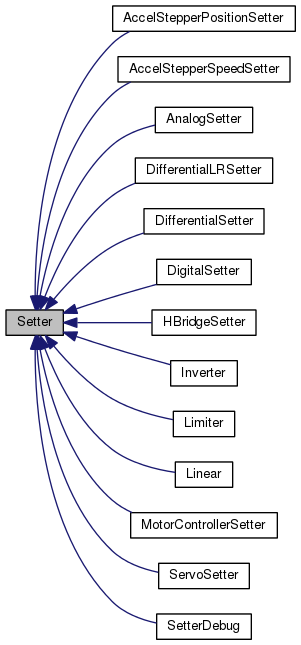
Virtual base class for classes that receive a value, maybe transform it and then do something with it.
Setters (ie different subclasses of Setter) are designed to be chained together. Each Setter in a chain transforms its input value in some way and then maybe passes it on to its output Setter. Setters can be designed to do almost any transformation with a number, including changing it, sending it to some device, using the value to set a physical output etc. Each setter can accept as input an int (ie a 16 bit signed number) although some Setters may be more constrained as to which value ranges make physical sense.
Constructor & Destructor Documentation
◆ Setter()
| Setter::Setter | ( | ) |
Constructor.
References _failsafeValue, and _target.
Member Function Documentation
◆ failsafe()
|
virtual |
Called when the source of input data is lost, and the Setter is required to fail in a safe way. Subclasses can override. Default is to send to next Setter in the chain.
Reimplemented in DifferentialSetter, MotorControllerSetter, HBridgeSetter, DigitalSetter, SetterDebug, AnalogSetter, and ServoSetter.
References _target, and failsafe().
Referenced by failsafe(), HBridgeSetter::failsafe(), MotorControllerSetter::failsafe(), DifferentialSetter::failsafe(), and RCRx::failsafe().
◆ failsafeValue()
| int Setter::failsafeValue | ( | ) |
Returns the most recently set failsafe value. Base class does not use this
References _failsafeValue.
Referenced by SetterDebug::failsafe(), and setFailsafeValue().
◆ input()
|
virtual |
This is where incoming values are set.
- Parameters
-
[in] value The input value
Reimplemented in DifferentialLRSetter, DifferentialSetter, MotorControllerSetter, HBridgeSetter, DigitalSetter, AnalogSetter, AccelStepperPositionSetter, AccelStepperSpeedSetter, ServoSetter, Limiter, Linear, SetterDebug, and Inverter.
References _target, and input().
Referenced by DifferentialSetter::doOutput(), Inverter::input(), Limiter::input(), Linear::input(), input(), HBridgeSetter::input(), MotorControllerSetter::input(), and RCRx::setAnalogOutput().
◆ setTarget()
|
virtual |
Connects this Setter to a downstream Setter
- Parameters
-
[in] target Pointer to a sublass of Setter, whose input() function will be called when a new value is available from this Setter.
References _target.
Referenced by HBridgeSetter::setTargets(), MotorControllerSetter::setTargets(), and DifferentialSetter::setTargets().
Member Data Documentation
◆ _failsafeValue
|
protected |
This is the failsafe value, which some setters use to set the output when a failsafe call is made
Referenced by AnalogSetter::failsafe(), DigitalSetter::failsafe(), failsafeValue(), setFailsafeValue(), and Setter().
The documentation for this class was generated from the following files:
- Setter.h
- Setter.cpp
